

Turvastsenaariumide korral puutuvad seireseadmed sageli tuulega - pikkade - kauguse paigaldamise tõttu põhjustatud võnkumised. Samal ajal kaamera oma lai - Nurgarežiim näitab minimaalset tundlikkust väliste häirete suhtes, telefonirežiim Võimaldab optiliselt mehaanilisi vibratsioone, põhjustades olulist pilti hägustumist või isegi sihtmärgi fookuse kadumist. Järelikult aktiivsed stabiliseerimismehhanismid on muutunud kriitiliseks tehniliseks nõudeks pika - vahemiku jälgimissüsteemide jaoks. Praegused stabiliseerimistehnoloogiad jagunevad peamiselt kahte kategooriasse: Optiline pildi stabiliseerimine (OIS) ja Elektrooniline pildi stabiliseerimine (EIS).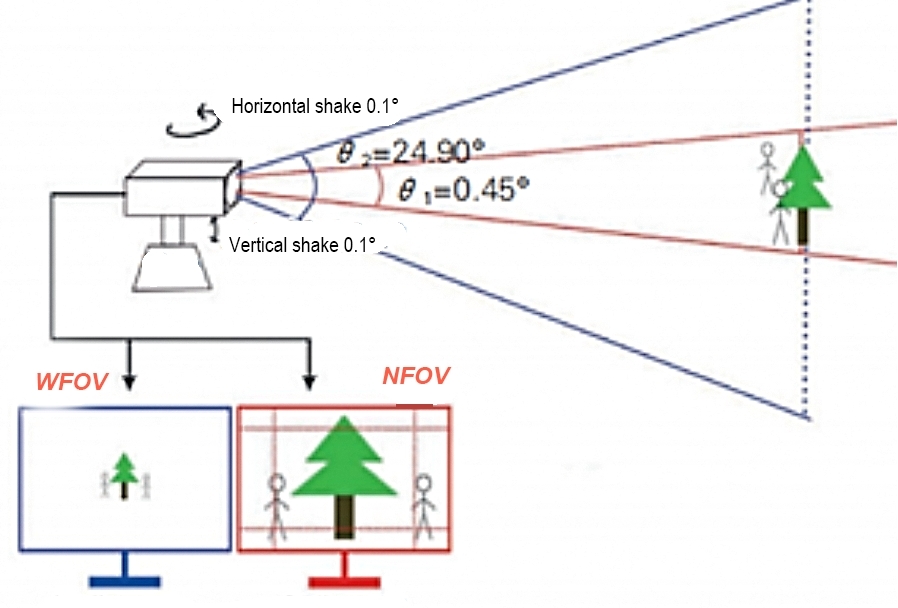
EIS kasutab pildistabiliseerimise saavutamiseks pildiposti - Töötlemisalgoritm. See nõuab praeguse löögi suurendamist, mille tulemuseks on 10% - 20% seirevälja kaotus. EIS -tehnoloogias vastutab objektiiv ainult pildi omandamise eest. Kui andur moodustab pildi, tuleb see kõigepealt stabiliseerida, kasutades sisseehitatud - pildiprotsessori tuuma algoritmi ning seejärel on video tihendatud ja edastatud. Seda tüüpi pildistabiliseerimine saavutatakse täielikult digitaalse töötlemise tehnoloogia abil, mis vähendab video kvaliteeti ja millel on üldine stabiliseerimisefekt. Üldiselt kasutatakse seda oma kulude eelise tõttu madalates lõpptoodetes.

OIS kasutab kaamera vibratsiooni tuvastamiseks läätsede koosseisus güroskoobi sisseehitatud - Güroskoop teisendab mehaanilised liikumise andmed OIS -kontrollerile edastatud elektrilisteks signaalideks. Kontrolleri keskne töötlemisseade analüüsib ja arvutab kohe nihke või nurga, mida objektiiv peab kompenseerimiseks, ning kasutab ajamimootori kaudu kolme mähise ja magneti komplekti tekitatud elektromagnetilist jõudu, et objektiiv täpselt juhtida, optilise tee korrigeerimiseks ja raputatud pildi hägususe vältimiseks. Optilise kujunduse korral juhitakse liikuva läätse lisamisega objektiivi nihe raputamise hulga põhjal, kompenseerides optilise tee stabiilsesse olekusse.
Iga kokkupuutetsükli jooksul peab OIS järjestikku täitma: vibratsiooni tuvastamine, signaalitöötlus ja kompenseeriv objektiivi aktiveerimine. Kogu protsess on servo liikumine, millel on ka lühikese avastamise aja omadused, kiire signaalitöötluse kiirus, väike läätse kompensatsiooni liikumine ja võtab vastu lihtsa ja suhteliselt stabiilse PID -juhtseadme algoritmi.
